 A line following robot using a
video camera as the only sensor with binary image
and video output.
A line following robot using a
video camera as the only sensor with binary image
and video output.
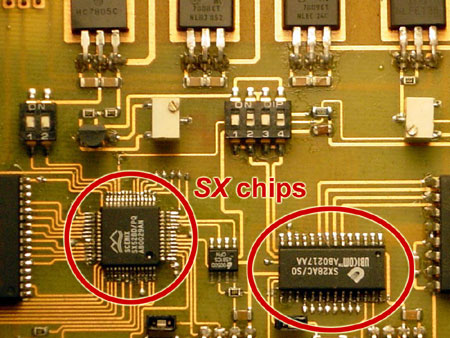
 A custom PCB was designed to house the
Ubicom SX52 and SX28 chips.
A custom PCB was designed to house the
Ubicom SX52 and SX28 chips.
 Functions of the SX52:
Functions of the SX52:
Functions of the SX28AC/SO:
The main portion of the source code is posted below. It is the code to store the data, calculate deviation between the line center and the main center and send the correction data to the SX28 in order to follow the line.
Sample of Code
;********************************************************************** ; * ; Filename: Hermes I * ; Date: Enero/2003-Mayo/2003 * ; File Version: 4.10 * ; * ;********************************************************************** ; * ; Notes: This program convert a video Image in a binary image, * ; save it in a Sram (AS7C1024), calculate the deviation * ; between the line and the memory center and send the * ; corrections speeds to a SX28 to generate the proper * ; pwm`s * ; * ;********************************************************************** device SX52,oschs3 In_Odd_Even = RA.1 In_Vsync = RA.2 In_Csync = RA.3 Video = RA.4 Sincro = RA.5 Sw_ON = RC.4 WE = RC.5 OE = RC.6 Ram_Bit = RC.7 RAM_X = RD RAM_Y = RE RESET Start ORG $00 org $0A RamX_Center ds 1 Valor ds 1 Divisor ds 1 Resultado ds 1 Delaycont ds 1 Counter ds 1 org $10 Puntos = $ ;bank0 variables Flag_P1 ds 1 Ini_P1 ds 1 End_P1 ds 1 Flag_P2 ds 1 Ini_P2 ds 1 Fin_P2 ds 1 Centro_P1 ds 1 Centro_P2 ds 1 Line_Center ds 1 Desviation ds 1 Speed ds 1 Start MODE $0F ;Set Mode to allow Direction configuration MOV !ra,#%10001111 ;Set port A MOV !rb,#%00000000 ;Set port B MOV !rc,#%10011100 ;Set port C MOV !rd,#%00000000 ;Set port D MOV !re,#%00000000 ;Set port E MODE $0E ;Set Mode to allow Pull-Up Resistor configuration MOV !ra,#%00000000 ;Set pull up resistors MOV !rb,#%00000000 ;Set pull up resistors MOV !rc,#%00000000 ;Set pull up resistors MOV !rd,#%00000000 ;Set pull up resistors MOV !re,#%00000000 ;Set pull up resistors bank Puntos MOV RamX_Center,#$7F ;Define Reference Ram center JMP Main ;************************************************************************************************************ ;************************************ SUBRUTINAS PAGINA 0 ***************************************** ;************************************************************************************************************ ;This routine send the binari image to a 256x256 bytes ram memory in binari format and just the odd frame ;in order to use the even frame to calculate speeds, desviations, etc. and draw its in the memory and don`t ;loose pictures Save_Image Next_003 JB In_Odd_even,Next_003 ;Wait the Odd Frame Next_004 JB In_Vsync,Next_004 ;Wait the Sart of the frame CALL Image_Center_Y ;Sincronize the Start of the capture in Y CALL Store_Ram ;configure ram enables and port C bits to save data Next_005 JB In_Csync,Next_005 ;Wait the H sinc CALL Wait_Sync CALL Image_Center_X ;Sincronize the Start of the capture in X Next_006 CLRB WE ;start to store the binari image JB RA.7,Next_007 ;in comparator data CLRB Ram_Bit JMP Next_008 Next_007 SETB Ram_Bit NOP Next_008 NOP SETB WE INCSZ RAM_X ;check the end of the ram memory in X JMP Next_006 INC RAM_Y Next_009 CJNE RAM_Y,#$C8,Next_005 ;check the end of the ram memory in Y Next_010 CALL Black_Pixel ;55 lines at the end always in black to draw speeds INCSZ RAM_X JMP Next_010 INC RAM_Y CJNE RAM_Y,#$FF,Next_010 ;end of the capture RET ;This routine search the ram and locate 2 points, start and end point of the line Search_Center CALL Read_Ram ;configure ram enables and port C bits to read data MOV RAM_Y,#$3F ;move the pointer to the line to search Next_019 JB Ram_Bit,Next_022 ;Search the line start INC RAM_X CJE RAM_X,#$FF,Next_020 ;Check no line and jump to stop motors JMP Next_019 Next_020 MOV Speed,#$00 SETB RA.6 ;stop left motor MOV RB,Speed nop CLRB RA.6 ;stop right motor RET Next_022 MOV Ini_P1,RAM_X ;store the Start point Next_023 JNB Ram_Bit,Next_025 ;Search the line end INC RAM_X CJE RAM_X,#$FF,Next_025 JMP Next_023 Next_025 MOV End_P1,RAM_X ;store the line end point RET
| file: /Techref/scenix/lib/io/dev/cam/linefollow.htm, 5KB, , updated: 2004/6/9 12:03, local time: 2025/10/21 14:37,
216.73.216.56,10-1-100-33:LOG IN
|
| ©2025 These pages are served without commercial sponsorship. (No popup ads, etc...).Bandwidth abuse increases hosting cost forcing sponsorship or shutdown. This server aggressively defends against automated copying for any reason including offline viewing, duplication, etc... Please respect this requirement and DO NOT RIP THIS SITE. Questions? <A HREF="http://ecomorder.com/Techref/scenix/lib/io/dev/cam/linefollow.htm"> A line following robot using a video camera as the only sensor with binary image and video output.</A> |
| Did you find what you needed? |
Welcome to ecomorder.com! |
Welcome to ecomorder.com! |
.